Долгое время российскую группировку спутников ДЗЗ высокого разрешения составляли космические аппараты, изначально разрабатываемые для нужд министерства обороны РФ. И хотя впоследствии некоторым из этих аппаратов был присвоен гражданский статус, информация, получаемая с них, не предназначалась для широкого использования, круг ведомств и организаций, допущенных к ней, был весьма ограничен, а коммерческая деятельность, вообще была сведена к минимуму. А между тем, в США и ряде других государств уже на протяжении нескольких лет действуют эффективные механизмы взаимодействия государства и рынка. Невозможность получить данные космической съемки с российских аппаратов толкала различные коммерческие организации и некоторые российские государственные учреждения приобретать материалы космической съемки у иностранных поставщиков. Поэтому необходимость создания собственной группировки коммерческих спутников зрела давно.
И вот, 22 июля 2012 года с космодрома Байконур ракетой-носителем Союз-ФГ были запущены два спутника-близнеца ДЗЗ: российский «Канопус-Вулкан» (далее КА «Канопус-В») и белорусский космический аппарат (далее БКА). Разработку и создание этих КА осуществляли предприятия ФГУП «НПП ВНИИЭМ» и ИИЦ «Геоинформационные системы» НАН Республики Беларусь по заказу МЧС России, Росгидромет, МПР России, Российской академии наук и НАН Беларуси. Часть ресурса этих космических аппаратов будет использоваться для коммерческих целей.
Характеристики космических аппаратов «Канопус-В» и БКА
Оба космические аппараты имеют общий внешний вид, схожие характеристики, оснащены одинаковой съемочной аппаратурой и находятся на одной солнечно-синхронной орбите с отстоянием друг от друга в 180 градусов. Они проектировались для работы в тандеме. На рисунке 1 показан внешний вид космических аппаратов. В таблице 1 приведены основные характеристики спутников.
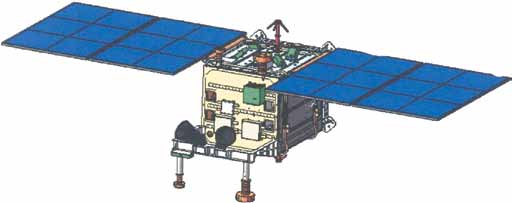
Рис. 1 — Внешний вид КА «Канопус-В» и БКА
Таблица 1 — Основные характеристики КА «Канопус-В» и БКА
|
Размер КА, м×м |
0.9×0.75 |
|
Масса КА |
450 кг |
|
Масса полезной нагрузки, кг |
110 |
|
Орбита: высота, км наклонение, град период обращения, мин время пересечения экватора, час |
Солнечно-синхронная утренняя 510 98 94,74 10:30 – 11:00 |
|
Платформа: |
от -40° до 40° 5 0,001 |
|
Период повторного наблюдения, сутки |
15 |
|
Среднесуточная мощность, Вт |
300 |
|
Срок активного существования, лет |
5-7 |
Космические аппараты «Канопус-В» и БКА предназначены для решения следующих задач:
- мониторинга чрезвычайных ситуаций;
- картографирования;
- обнаружения очагов лесных пожаров и выбросов загрязняющих веществ;
- регистрации аномальных физических явлений в целях изучения и прогнозирования землетрясений;
- мониторинга водных ресурсов и сельского хозяйства;
- решения задач землепользования;
- высокооперативного наблюдения.
В настоящее время КА «Канопус-В» является основным российским космическим аппаратом ДЗЗ высокого разрешения и его запуск — это показатель прогресса развития российской космонавтики.
Структурно космические аппараты «Канопус-В» и БКА включают служебную платформу (СП) и комплекс целевой аппаратуры (КЦА). Структурная схема этих космических аппаратов на примере КА «Канопус-В» представлена на рисунке 2.
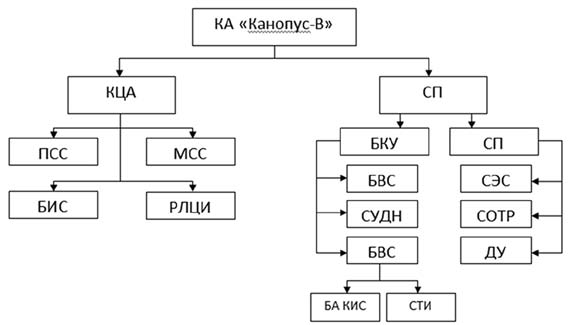
Рис. 2 — Структурная схема КА «Канопус-В»
Служебная платформа предназначена для навигационного обеспечения, управления движением КА, а также осуществления вычислительных операций для ориентации КА в пространстве. В состав СП входят бортовой комплекс управления (БКУ) и служебные системы (СС). В свою очередь БКУ включает:
- бортовой вычислительной системы (БВС);
- систему управления движением и навигацией (СУДН);
- телекомандную систему (ТКС) в составе: бортовой аппаратуры командно-измерительной системы (БА КИС) и систему телеметрических наблюдений (СТН).
Служебные системы включают:
- систему энергоснабжения (СЭС);
- систему обеспечения теплового режима (СОТР);
- двигательную установку (ДУ).
Комплекс целевой аппаратуры предназначен для сбора и формирования видеоданных, последующей их передачи по радиолинии и включает:
- измерительную (съемочную) аппаратуру;
- блок управления и формирования данных;
- радиолинию передачи целевой информации (РЛЦИ).
В состав измерительной аппаратуры входят две съемочные системы, обеспечивающие съемку поверхности Земли и формирование микрокадров:
- панхроматическая съемочная система (ПСС);
- многозональная съемочная система (МСС).
Первая позволяет получать видеоданные поверхности земли в одном спектральном диапазоне (панхроматическом) с геометрическим разрешением в 2,1 метр. Вторая система – в четырех основных спектрах, с геометрическим разрешением 10,5 метров.
ПСС имеет отличительную, от многих других съемочных систем, особенность. Регистрация оптической информации (видеоданных) КЦА осуществляется методом «коленчатого вала».
В ПСС находятся 6 матриц ПЗС, расположенных в шахматном порядке в два ряда (относительно направления движения спутника по орбите). В момент съемки все 6 матриц регистрируют видеоданные и в ПСС формируются 6 микрокадров. Фактически, эти 6 микрокадров являются одним кадром видеоданных съемки. Микрокадры видеоданных каждого последующего кадра, заполняют пустоты между микрокадрами предыдущего кадра, тем самым обеспечивается связь между соседними кадрами видеоданных. Схема перекрытия видеоданных, получаемых ПСС, показана на рисунке 3.

Рисунок 3. — Схема перекрытия видеоданных, получаемых ПСС
МСС обеспечивает многозональную съемку посредством фиксации спектральной информации на 4-х независимых друг от друга матрицах, каждая из которых светочувствительна к определенным спектральным диапазонам.
Каждый кадр и микрокадр съемки содержит видеоданные, служебную и телеметрическую информации.
Кадр съемки МСС и микрокадр ПСС содержат по 985 строк и по 1920 столбцов видеоданных. Каждый последующий микрокадр ПСС имеет с предыдущим микрокадром ПСС продольное перекрытие в 80 пиксельных строк. Поперечное перекрытие между микрокадрами составляет 70 пиксельных столбцов. В таблице 3 приведены характеристики и параметры обоих съемочных систем. На рисунках 4 и 5 изображены ПСС и МСС.
Таблица 2 — Основные характеристики ПСС и МСС
|
Основные характеристики |
ПСС |
МСС |
|
Количество спектральных каналов |
1 |
4 |
|
Спектральные диапазоны (по уровню 0,5), мкм |
Панхроматический (0,54 – 0,86) |
Синий (0,46-0,52) |
|
Фокусное расстояние, мм |
1797,5 |
359,5 |
|
Относительное отверстие |
1:10,3 |
1:5,6 |
|
Светопропускание |
0,7 |
0,6 – 0,8 |
|
размер матрицы (пиксель) |
1920х985 |
1920х985 |
|
При съемке в надир: Полоса захвата, км Геометрическое разрешение, м Линейное разрешение на местности в зачетных условиях, м |
23,3 2,1 2,7 |
20,1 10,5 12 |
|
Площадь, снимаемая одномоментно, км |
45,3 (6 микрокадров) |
195 |

Рис. 4 Внешний вид ПСС

Рис. 5 Внешний вид МСС
В состав блока управления и формирования данных входит энергонезависимое бортовое запоминающее устройство (БЗУ) объемом 2х24ГБ, обеспечивающее как хранение видеоинформации на срок не менее 5-ти суток, так и буферирование ее в режиме непосредственной передачи по каналу РЛЦИ.
Основные характеристики РЛЦИ представлены таблице 3:
Таблица 3 — Основные характеристики РЛЦИ
|
Диапазон рабочих частот, МГц |
8048 - 8381,5 |
|
Количество каналов передачи |
2 |
|
Скорость передачи данных, Мбит/с |
61,4…122,88 |
Динамическая модель съемки ПСС и МСС
Видеоинформация, получаемая с космических аппаратов высокого и сверхвысокого разрешения, содержит в себе геометрические искажения, возникающие вследствие дисторсии съемочных объективов систем, искривления хода лучей света иллюминатором, внутренней рефракции лучей света из-за разности давления атмосферы внутри отсека с аппаратурой и снаружи, а также погрешности калибровки съемочной аппаратуры. В связи с этим, для производства высокоточных фотограмметрических работ возникает необходимость моделирования съемки с учетом геометрических искажений.
В настоящее время существует около десятка различных методов учета искажений, но, фактически, стандартом описания геометрических искажений для их устранения на снимках стали так называемые RPC (Rational Polynomial Coefficients).
RPC представляют собой набор параметров, необходимых для решения полиномов 3-ей степени, необходимых и достаточных для повышения качества геопривязки видеоданных спутников высокого и сверхвысокого разрешений. Они основаны на соотношениях следующего вида, связывающих нормированные геодезические координаты точки местности с нормированными координатами её изображения на снимке:
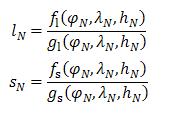
Числители и знаменатели этих соотношений представляют собой полиномы третьей степени:
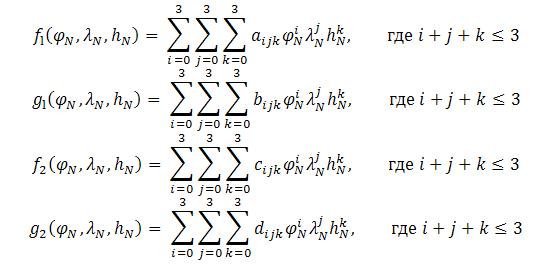
Нормировка пиксельных и геодезических координат производится так, чтобы их нормированные значения по модулю не превосходили 1, и выполняется по следующим формулам:
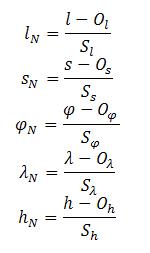
Как видно из уравнений, исходными параметрами, которые необходимы для решения уравнений, являются:
- коэффициенты полиномов ;
- параметры нормировки: поправки за смещение
 и поправка за
разномасштабность
и поправка за
разномасштабность 
Расчет коэффициентов рациональных функций производится следующим образом:
- Определяются элементы внешнего ориентирования снимка в соответствии со строгой моделью сенсора по опорным точкам (либо используются элементы внешнего ориентирования, полученные по навигационным данным);
- По всему полю изображения и всему диапазону высот данной территории равномерно вычисляются опорные точки (xf, yf, X, Y, Z) с использованием строгой модели сенсора;
- Составляется система уравнений и методом наименьших квадратов (МНК) вычисляются коэффициенты рациональных полиномов.
Важно знать, что имея корректные RPC, правильно описывающие модель съемки сенсора, можно производить фотограмметрические работы без дополнительного уточнения планово-высотной привязки в процессе работ, то есть без использования уточняющих опорных точек.
Таким вот образом, для каждого кадра съемки космических аппаратов составляются собственные RPC.
На большинстве цифровых фотограмметрических станций в мире, таких как «PHOTOMOD», «ERDAS IMAGINE LPS», «Dat/EM» уже имеются программные модули, позволяющие решать задачи уравнивания космических изображений по RPC. Для моделирования съемок c современных иностранных аналогов КА «Канопус-В» и БКА RPC применяются уже долгое время. Так как доступ к данным КА «Канопус-В» и БКА будет предоставлен не только государственным учреждениям, но и коммерческим организациям, то и возможности обработки изображений должны быть рассчитаны на широкий круг программных продуктов. Исходя из этого, использование RPC, как часть данных, входящих в комплект предоставляемой продукции, является наиболее рациональным техническим решением восстановления геометрической точности космических снимков КА «Канопус-В» и БКА. Примечательно, что RPC будут впервые в российской практике применяться для моделирования съемки с космического аппарата.
Исследования точностных характеристик снимков, получаемых КА «Канопус-В» и БКА
В период летных испытаний отделом цифровой фотограмметрии при компании «Иннотер» была опробована технология фотограмметрической обработки видеоданных, получаемых с рассматриваемых космических аппаратов, и выяснены фактические точностные характеристики снимков КЦА.
В целях реализации технологии построения ортофотопланов были выполнены работы на следующие районы: территория аэропорта «Аль-Мактум» (г. Дубай, ОАЭ), окрестности города Шеньян (Китай), Пятигорский фотограмметрический полигон (г. Пятигорск, Россия), окрестности города Колумбия (штат Миссисипи, США), территория города Варшава (Польша).
Проекты «Аль-Мактум» и «Шеньян»
В проектах «Аэропорт «Аль-Мактум» и «Шеньян» рассматривалась возможность фотограмметрической обработки видео данных без применения RPC-полиномов, универсальным способом, то есть построения ортофотопланов по геопривязанным микрокадрам, цифровой модели местности, опорным и связующим точкам. Обработка видеоданных осуществлялась на цифровых фотограмметрических станциях (ЦФС) «PHOTOMOD 5.2».
Технология обработки заключалась в следующем:
- Создавался проект с заданной системой координат, в него загружались видеоданные и соответствующие фрагменты SRTM;
- Осуществлялся набор связующих точек между перекрывающимися микрокадрами;
- Опознавались опорные и контрольные точки на видеоданных;
- Производилось уравнивание изображений универсальным способом по связующим, опорным точкам и фрагментам SRTM;
- По уравненным изображениям создавались ортотрансформированные изображения.
Сводная информация о проектах и результаты уравнивания видеоданных представлены в таблице 4. На рисунках 6 и 7 показаны использованные в обработке изображения. В таблице 5 приведены результаты первичного контроля выпускаемых ортофотопланов. В таблице 6 – данные контроля построения мозаики вдоль порезов. Вторичный контроль продукции представлен в форме сводной таблицы 7.
Таблица 4 — Уравнивание видеоданных в проектах «Аэропорт «Аль-Мактум» и «Шеньян»
|
Название проекта |
Аэропорт «Аль-Мактум» |
«Шеньян» |
|
Получены с КА |
«Канопус-В» |
БКА |
|
Кол-во единиц обработанных видеоданных |
4 микрокадра |
1 сшитый фрагмент (4 микрокадра) |
|
Количество связующих точек |
12 |
0 |
|
Количество контрольных точек |
9 |
4 |
|
Количество опорных точек |
40 |
14 |
|
Всего точек |
61 |
18 |
|
Опорные точки |
Exy (м) |
Exy (м) |
|
Среднеквадратическая |
1.25 |
1.64 |
|
Средняя |
1.60 |
1.48 |
|
Максимальная |
2.14 |
2.93 |
|
Контрольные точки |
Exy (м) |
Exy (м) |
|
Среднеквадратическая |
1.38 |
2.01 |
|
Средняя |
1.22 |
1.90 |
|
Максимальная |
2.06 |
2.93 |
|
Связующие точки |
Exy (м) |
Exy (м) |
|
Среднеквадратическая |
1.31 |
- |
|
Средняя |
1.21 |
- |
|
Максимальная |
1.96 |
- |
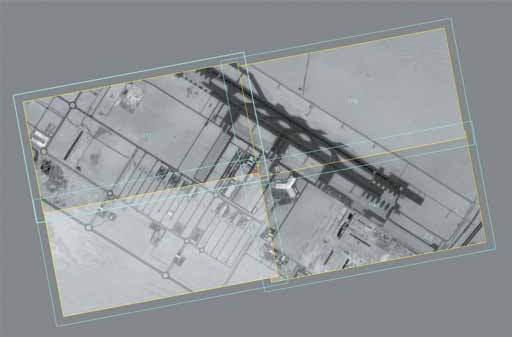
Рис. 6 — Аэропорт «Аль-Мактум» (г. Дубай, ОАЭ)

Рис. 7 — Шеньян (Китай)
Таблица 5 — Первичный контроль выпускаемой продукции в проектах «Аэропорт «Аль-Мактум» и «Шеньян»
|
Название проекта |
Аэропорт «Аль-Мактум» |
«Шеньян» |
||||
|
|
Ex (м) |
Ey (м) |
Exy (м) |
Ex (м) |
Ey (м) |
Exy (м) |
|
СКО |
1.12 |
0.82 |
1.38 |
1.15 |
1.33 |
1.76 |
|
Средний модуль |
0.87 |
0.66 |
1.16 |
0.92 |
1.11 |
1.60 |
|
Максимальное «+» |
1.88 |
1.24 |
4.14 |
1.71 |
2.24 |
3.14 |
|
Максимальное «-» |
-4.12 |
-3.00 |
- |
-3.12 |
-2.75 |
- |
|
|
СКО |
Средний |
Макс |
СКО |
Средний |
Макс |
|
По контрольным, м |
2.15 |
1.57 |
4.14 |
2.33 |
1.92 |
2.9 |
|
По опорным, м |
1.22 |
1.07 |
2.17 |
1.74 |
1.50 |
3.14 |
|
По связующим, м |
1.33 |
1,22 |
2.16 |
- |
- |
- |
Таблица 6 — Контроль точности построения мозаики вдоль линии порезов в проекте «Аэропорт «Аль-Мактум»
|
Название проекта |
Аэропорт «Аль-Мактум» |
||
|
|
Ex (м) |
Ey (м) |
Exy (м) |
|
СКО |
2.057 |
2.525 |
3.256 |
|
Средний модуль |
1.550 |
1.973 |
2.686 |
|
Максимальное «+» |
5.649 |
6.106 |
8.318 |
|
Максимальное «-» |
-4.600 |
-4.600 |
- |
Таблица 7 Вторичный контроль выпускаемой продукции в проектах «Аэропорт «Аль-Мактум» и «Шеньян»
|
Название проекта |
Аэропорт «Аль-Мактум» |
«Шеньян» |
|
Exy (м) |
Exy (м) |
|
|
Среднеквадратическое расхождение |
1.38 |
1.76 |
|
Среднее расхождение |
1.16 |
1.60 |
|
Максимальное расхождение |
4.14 |
3.14 |
Как показала впоследствии практика, такой способ обработки по точностным характеристикам для изображений с данных космических аппаратов не уступает способу RPC-полиномов, но его недостаток (необходимость использования большого количества опорных точек) делает его практически полезным лишь для создания ортофотопланов на небольшие территории.
Проект «Пятигорский полигон»
В проекте «Пятигорский полигон» рассматривалась возможность использования RPC для уточнения геопривязки видеоданных.
Сводная информация, результаты уравнивания, контроля точности выпускаемого ортофотоплана, контроля точности вдоль порезов и вторичного контролей ортофототрансформированного изображения приведены в таблицах 8-13 соответственно. В таблице 14 приведен результат уравнивания видеоданных без использования опорных точек.
На рисунке 8 показаны микрокадры обработанного изображения. На рисунке 9 отражена использованная в создании ортофототрансформированного изображения цифровая матрица высот SRTM с шагом в 80,5 метров.
Фотограмметрическая обработка осуществлялась, также как и в случае выше описанных проектов, на ЦФС «PHOTOMOD5.2». Технология обработки была выбрана аналогичной предыдущим проектам, за исключением того, что уравнивание производилось с использование RPC.
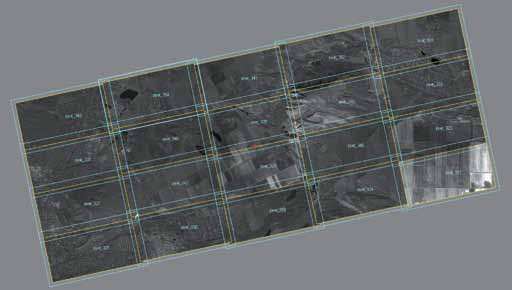
Рис. 8 — Фрагмент Пятигорского фотограмметрического полигона
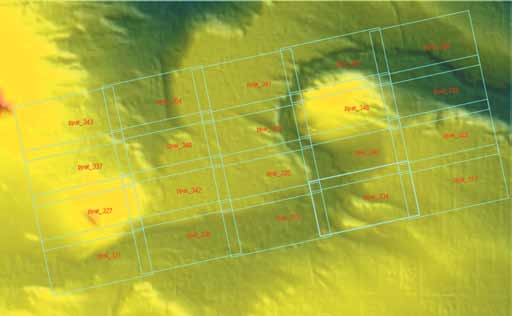
Рис. 9 — Цифровая матрица высот (SRTM) на территорию Пятигорского фотограмметрического полигона
Таблица 8 Уравнивание видеоданных в проекте «Пятигорский полигон»
|
Получены с КА |
«Канопус-В» |
|
Кол-во единиц обработанных видеоданных |
20микрокадров |
|
Количество связующих точек |
126 |
|
Количество контрольных точек |
8 |
|
Количество опорных точек |
50 |
|
Всего точек |
184 |
|
Опорные точки |
Exy (м) |
|
Среднеквадратическая |
2.33 |
|
Средняя |
2.03 |
|
Максимальная |
3.78 |
|
Контрольные точки |
Exy (м) |
|
Среднеквадратическая |
2.43 |
|
Средняя |
2.31 |
|
Максимальная |
3.55 |
|
Связующие точки |
Exy (м) |
|
Среднеквадратическая |
0.61 |
|
Средняя |
0.57 |
|
Максимальная |
0.96 |
Таблица 9 Результаты уравнивания видеоданных с одной опорной точкой в проекте «Пятигорский полигон»
|
Опорная точка |
Exy (м) |
|
Среднеквадратическая |
8.54 |
|
Контрольные точки |
Exy (м) |
|
Среднеквадратическая |
7.27 |
|
Средняя |
7.09 |
|
Максимальная |
9.89 |
Таблица 10 Результаты уравнивания видеоданных с пятью опорными точками в проекте «Пятигорский полигон»
|
Опорные точки |
Exy (м) |
|
Среднеквадратическая |
2.55 |
|
Средняя |
2.36 |
|
Максимальная |
3.93 |
|
Контрольные точки |
Exy (м) |
|
Среднеквадратическая |
3.36 |
|
Средняя |
3.13 |
|
Максимальная |
5.49 |
Таблица 11 Первичный контроль выпускаемой продукции в проекте «Пятигорский полигон»
|
|
Ex (м) |
Ey (м) |
Exy (м) |
|
СКО |
1.00 |
0.99 |
1.41 |
|
Средний модуль |
0.64 |
0.66 |
1.04 |
|
Максимальное «+» |
3.65 |
3.04 |
3.69 |
|
Максимальное «-» |
-3.17 |
-3.67 |
- |
|
|
СКО |
Средний |
Макс |
|
По контрольным, м |
0.60 |
0.55 |
1.05 |
|
По опорным, м |
2.74 |
2.26 |
3.69 |
|
По связующим, м |
1.41 |
1.04 |
3.67 |
Таблица 12 Контроль точности построения мозаики вдоль линии порезов в проекте «Пятигорский полигон»
|
|
Ex (м) |
Ey (м) |
Exy (м) |
|
СКО |
1.03 |
1.04 |
1.46 |
|
Средний модуль |
0.82 |
0.86 |
1.29 |
|
Максимальное «+» |
2.08 |
2.03 |
2.92 |
|
Максимальное «-» |
-2.09 |
-2.08 |
- |
Таблица 13 Вторичный контроль выпускаемой продукции в проекте «Пятигорский полигон»
|
В плане |
Exy (м) |
|
Среднеквадратическое расхождение |
2.82 |
|
Среднее расхождение |
2.68 |
|
Максимальное расхождение |
3.85 |
Таблица 14 Результат уравнивания видеоданных без использования опорных точек в проекте «Пятигорский»
|
Контрольные точки |
Exy (м) |
|
Среднеквадратическая |
62.05 |
|
Средняя |
62.05 |
|
Максимальная |
65.07 |
Результаты проекта «Пятигорский полигон» показали, что уравнивание по предложенным RPC без опорных точек не позволяет получать высокоточные ортофотопланы. Максимальная погрешность планового положения контуров при таком уравнивании достигает 62,07 метра. Но при использовании даже одной опорной точки точность планово-высотной привязки возрастает в 7-8 раз, СКО контрольных точек равна 7,27 метра. А при использовании большего количества опорных точек точность уравнивания достигает точности уравнивания плановых координат опорных точек для создания или обновления карт масштаба 1:10 000 и крупнее, а также удовлетворяет требованиям к геометрической точности топографических карт масштаба 1:10 000 и крупнее. СКО планового положения опорных точек при уравнивании с 5 опорными точками равна 2,55 метра, с 50 опорными точками 2,33 метра.
Проект «Колумбия»
В проекте «Колумбия» использовалась уточненная версия RPC, и его отличительной особенностью было то, что контроль точности создаваемой продукции производился как по спутниковой карте «Google», так и по ортофотопланам, созданным USSG (Геологической службой США) по результатам аэрофотосъемки и свободно предоставляемым ресурсом "Earthexplorer". Использованные ортофотопланы соответствуют FGDC-STD-007.3-1998 NSSDA (Национальному стандарту точности пространственных данных США) для масштаба 1:4800, их СКО в плане 1,22 метра, поставляются в системе координат NAD83/Mississippi, и, вследствие чего, с данных ортофотопланов снимались координаты распознаваемых контуров и пересчитывались в систему координат WGS84 UTM16N.
Как и в предыдущих случаях, фотограмметрическая обработка осуществлялась на ФЦС «PHOTOMOD5.2». Сводная информация, результаты уравнивания с опорными точками, с одной опорной, с 5 опорными точками и без опорных точек, представлены таблицами 15-18. На рисунках 10-12 изображены схема обработанных микрокадров на данную территорию, схема автоматически распознанных связующих точек и схема уравненных микрокадров соответственно. Первичный и вторичный контроли, а также контроль по линии порезов ортофототрансформированного изображения представлены в таблицах 19-21.
В таблице 22 приведены оценки расхождений в плановых координатах между двумя контрольными слоями. На рисунке 13 показан общий вид построенного ортофотоплана.
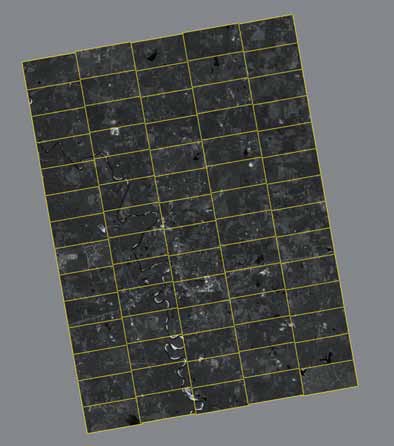
Рис. 10 Схема обработанных микрокадров в проекте «Колумбия»
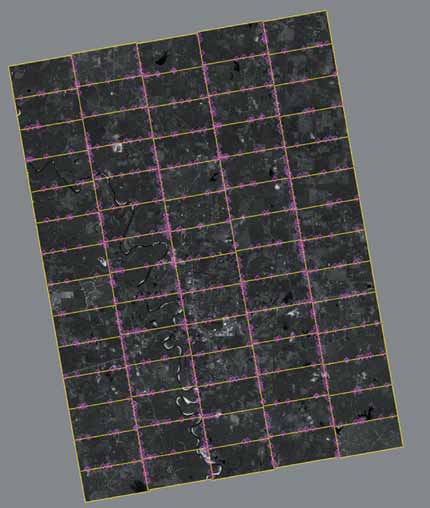
Рис. 11 Схема автоматически распознанных связующих точек в проекте «Колумбия»
Таблица 15 Уравнивание видео данных в проекте «Колумбия»
|
Получены с КА |
«Канопус-В» |
|
Кол-во единиц обработанных видеоданных |
70микрокадров |
|
Количество связующих точек |
639 |
|
Количество контрольных точек |
6 |
|
Количество опорных точек |
27 |
|
Всего точек |
672 |
|
Опорные точки |
Exy (м) |
|
Среднеквадратическая |
2.25 |
|
Средняя |
2.06 |
|
Максимальная |
3.89 |
|
Контрольные точки |
Exy (м) |
|
Среднеквадратическая |
2.53 |
|
Средняя |
2.24 |
|
Максимальная |
3.94 |
|
Связующие точки |
Exy (м) |
|
Среднеквадратическая |
0.44 |
|
Средняя |
0.38 |
|
Максимальная |
1.45 |
Таблица 16 Результат уравнивания видеоданных с использованием 1-ой опорной точки в проекте «Колумбия».
|
Опорная точка |
Exy (м) |
|
Среднеквадратическая |
0.46 |
|
Контрольные точки |
Exy (м) |
|
Среднеквадратическая |
3.04 |
|
Средняя |
2.80 |
|
Максимальная |
5.27 |
Таблица 17 Результат уравнивания видеоданных с использованием 5-ой опорной точки в проекте «Колумбия».
|
Опорные точки |
Exy (м) |
|
Среднеквадратическая |
2.23 |
|
Средняя |
2.06 |
|
Максимальная |
3.65 |
|
Контрольные точки |
Exy (м) |
|
Среднеквадратическая |
2.66 |
|
Средняя |
2.46 |
|
Максимальная |
4.61 |
Таблица 18 Результат уравнивания видеоданных без использования опорных точек в проекте «Колумбия».
|
Контрольные точки |
Exy (м) |
|
Среднеквадратическая |
17.74 |
|
Средняя |
17.83 |
|
Максимальная |
21.59 |
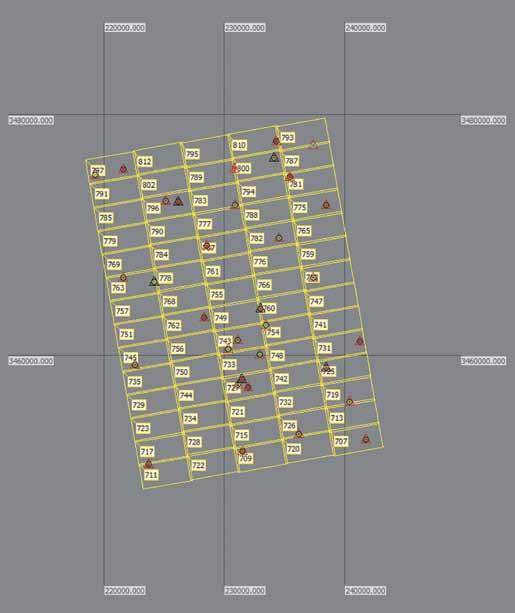
Рис. 12 Схема уравненных микрокадров в проекте «Колумбия»
Таблица 19 Первичный контроль выпускаемой продукции в проекте «Колумбия».
|
|
Ex (м) |
Ey (м) |
Exy (м) |
|
СКО |
0.46 |
0.46 |
0.65 |
|
Средний модуль |
0.280 |
0.268 |
0.43 |
|
Максимальное «+» |
3.56 |
3.54 |
3.94 |
|
Максимальное «-» |
-2.59 |
-3.38 |
- |
|
|
СКО |
Средний |
Макс |
|
По контрольным, м |
0.43 |
0.35 |
1.28 |
|
По опорным, м |
2.19 |
1.96 |
3.94 |
|
По связующим, м |
2.53 |
2.24 |
3.93 |
Таблица 20 Контроль точности построения мозаики вдоль линии порезов в проекте «Пятигорский полигон»
|
|
Ex (м) |
Ey (м) |
Exy (м) |
|
СКО |
1.000 |
1.057 |
1.455 |
|
Средний модуль |
0.794 |
0.850 |
1.269 |
|
Максимальное «+» |
2.149 |
2.145 |
2.829 |
|
Максимальное «-» |
-2.140 |
-2.154 |
- |
Таблица 21 Вторичный контроль выпускаемой продукции в проекте «Колумбия».
|
Расхождения |
Контроль выходной продукции по ортофотопланам Earthexplorer |
Контроль ортофотоплана по спутниковым картам "Google" |
|
В плане |
Exy (м) |
Exy (м) |
|
Среднеквадратическое |
2.35 |
4.49 |
|
Средний |
2.21 |
4.28 |
|
Максимальное |
3.90 |
6.00 |
Таблица 22 Оценка расхождений положения точек ортофотопланов, полученных с информационного ресурса "Earthexplorer" и опознанных на спутниковой карте "Google".
|
В плане |
Exy (м) |
|
Среднеквадратическое |
3.12 |
|
Среднее |
2.87 |
|
Максимальное |
4.90 |
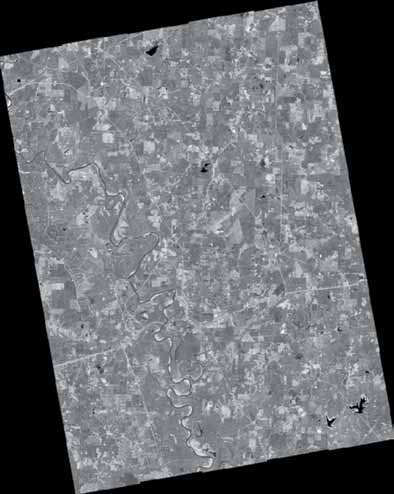
Рис. 13 Выходная продукция проекта «Колумбия».
В ходе работ по проекту было отмечено, что:
- В RPC-полиномах присутствует систематическая погрешность (среднеквадратическая погрешность по контрольным точкам с использованием цифровой модели рельефа равна 17,74 метров, среднеквадратическая погрешность по контрольным точкам с использованием средней высоты рельефа равна 17,86 метров), которая может быть компенсирована, использованием опорных точек;
- При использовании хотя бы одной опорной точки систематическая погрешность значительно снижается (среднеквадратическая погрешность по контрольным точкам составляет 3,04 метра);
- Набор связующих точек при производстве продукций осуществлялся автоматически, и, как показала практика, существенно не нуждался в фильтрации и добавления связующих точек мануально.
При создании ортофотоплана, в соответствии с инструкцией по фотограмметрическим работам точность уравнивания соответствует точности уравнивания плановых координат опорных точек для создания карт масштаба 1:10 000 и крупнее, а точность созданных цифровых ортофотопланов удовлетворяла требованиям к геометрической точности топографических карт масштаба 1:10 000 и крупнее.
Проект «Варшава»
Отработка технологии создания ортотрансформированной продукции по микрокадрам «Канопус-В» была осуществлена и в программном модуле «ERDAS IMAGINE LPS». Сложностью отработки технологии в данном программном продукте стал то факт, что до последнего времени в нем не было предусмотрена возможность уравнивания по RPC, поставляемыми с космическими снимками «Канопус-В» и БКА. В результате трехстороннего сотрудничества «Иннотер», ФГУП «НПП ВНИИЭМ» и Integraph эта проблема была преодолена.
В результате работ по проекту «Варшава», который как раз и выполнялся в программном модуле «ERDAS IMAGINE LPS», был создан ортофотоплан на участок городской застройки. Для этого был осуществлен набор связующих точек, опознание контрольных и опорных точек, уравнивание микрокадров с использованием RPC, цифровой матрицы высот (SRTM), опорных и связующих точек с последующей автоматической мозаичной сшивкой в ортофототрансформированное изображение. На рисунке 14 представлены микрокадры, использованные для сшивки в проекте. На рисунках 15-16 отражены окна уравнивания блока микрокадров проекта «Варшава» с использованием RPC в LPS и автоматического мозаичного построения ортофотоплана, а также сама выходная продукция соответственно. В таблицах 23-24 отражены результаты работ по проекту. На рисунке 17 – образец выходной продукции.
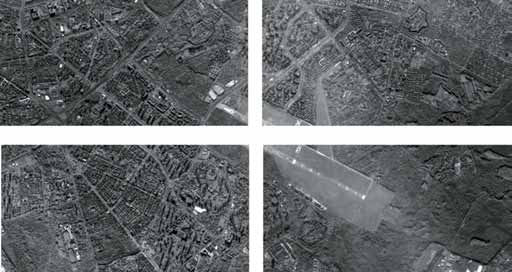
Рис. 14 Микрокадры, использованные для сшивки в проекте «Варшава»
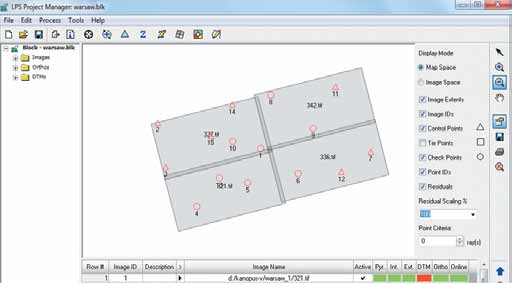
Рис. 15 Окно уравнивания блока микрокадров проекта «Варшава» с использованием RPC в LPS
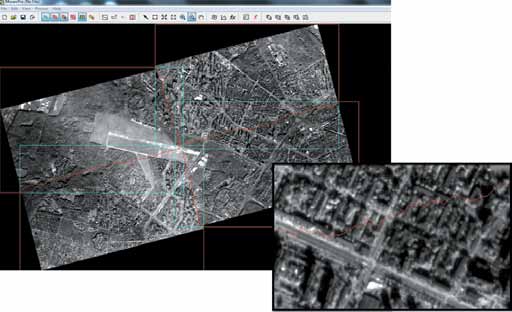
Рис. 16 Окно автоматического мозаичного построения ортофотоплана в LPS
Таблица 23 Результаты уравнивания в проекте «Варшава»
|
Получены с КА |
«Канопус-В» |
|
Кол-во единиц обработанных видеоданных |
4 микрокадра |
|
Опорные точки |
Exy (м) |
|
Среднеквадратическая |
2.57 |
|
Средняя |
2.31 |
|
Максимальная |
3.97 |
|
Контрольные точки |
Exy (м) |
|
Среднеквадратическая |
2.76 |
|
Средняя |
2.54 |
|
Максимальная |
3.89 |
|
Связующие точки |
Exy (м) |
|
Среднеквадратическая |
0.74 |
|
Средняя |
0.70 |
|
Максимальная |
1.45 |
Таблица 24 Результат независимого контроля ортофотоплана территории города Варшава на ЦФС «PHOTOMOD5.2»
|
В плане |
Exy (м) |
|
Среднеквадратическое расхождение |
1,82 |
|
Среднее расхождение |
1,70 |
|
Максимальное расхождение |
2,87 |
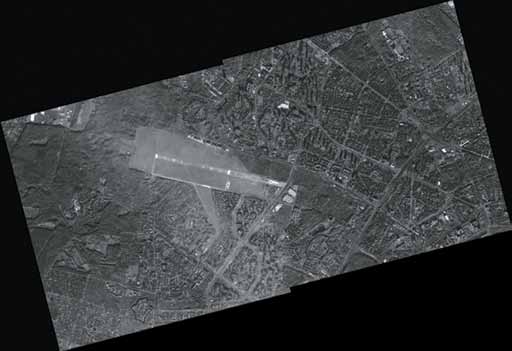
Рис. 17 Выходная продукция проекта Варшава
В результате фотограмметрической обработки в программном модуле LPS было создано мозаичное изображение из микрокадров снимков КА «Канопус-В», по своим точностным характеристикам не уступающие ортофотопланам, построенным в «PHOTOMOD5.2».
Выводы
По результатам исследования точностных характеристик были сделаны следующие выводы:
- Материалы, получаемые КА «Канопус-В» и БКА, пригодны по своим точностным характеристикам для создания и обновления топографических, навигационных карт и ортофотопланов масштабов 1:25000 и крупнее. И хотя точностные характеристики удовлетворяют требованиям создания или обновления карт крупнее масштаба 1:25000, дешифровочные характеристики материалов позволяют производить картографические работы только для карт масштаба 1:25000 и мельче.
- Исходя из полученных оценок уравнивания материалов космических съемок с КА «Канопус-В», была выявлена систематическая погрешность геопривязки микрокадров, среднее значение которой составляет 17,83 метра. Близкие значения к этой величине систематической погрешности были получены и другими организациями, осуществлявшими оценку точностных характеристик КА «Канопус-В».
- Выявленная систематическая погрешность геопривязки может быть устранена посредством вычисления более корректных RPC, а, следовательно, дальнейшее повышение точностных характеристик материалов, полученных с данного спутника, остается возможным.
На основании выполненных исследований было разработано экспертное заключение ООО «Иннотер», представленное для оценки результатов летных испытаний.
Использованная литература
- Владимиров, А.В. Космическая система оперативного мониторинга техногенных и природных чрезвычайных ситуаций на базе КК «Канопус-В» и Белорусского Космического Аппарата/ А.В. Владимиров, Р.С. Салихов, Н.А. Сеник, С.А. Золотой// ВОПРОСЫ ЭЛЕКТРОМЕХАНИКИ. ТРУДЫ ВНИИЭМ. – 2008 – Т 105. - C.49-57
- Макушева, Е.В. Разработка динамической геометрической модели съемки оптико-электронных съемочных систем для перспективных космических комплексов типа «КАНОПУС-В»/ Е.В. Макушева, В.В. Некрасов// ВОПРОСЫ ЭЛЕКТРОМЕХАНИКИ. ТРУДЫ ВНИИЭМ. – 2010 – Т 119. - C.25-30
- Кравцова, Е.В. Технология обработки снимков с перспективного спутника «Канопус-В» с использованием PHOTOMOD/Е.В. Кравцова. - 2011 – N 4. – С.33-37
- Ильин, Г.В. Анализ возможности создания по космическим снимкам топографических планов при инженерных изысканиях для строительства/ Г.В. Ильин, В.Н. Лавров, Юрченко Б.А.// – 2012 – N 1. – C. 97-106
- «Инструкция по фотограмметрическим работам при создании цифровых топографических карт и планов», ГКИНП (ГНТА) – 02-036-02. – М.:ЦНИИГАиК,2004.
Финошин Д.Г., Кравцова Е.В., Лобанов В.К., "Иннотер"